Powerful yet efficient. The export of robotran multibody model towards low-power hardwares. Discover Robotran’s capabilities for exporting your multibody model towards low-power hardwares !
Keywords: Digital Twin; FPGA; MicroProcessor; Symbolic generator;
One interest of symbolically generated multibody models – at the root of the ROBOTRAN software – is the creation of a stand-alone set of equations calculating the dynamic model of multibody systems. Those are used as a computational component within a Digital Twin-type process. The export of Robotran multibody model towards low-power hardwares is simply not a problem !
The next goal is to embed realistic and complex multibody models within processes or devices whose functioning requires a synchronized real-time computation of their motion.
The implementation of symbolic models of large multibody systems is possible on low-power (and low-cost) hardwares. Furthermore, the performance of some of them even rivals that of modern computers !
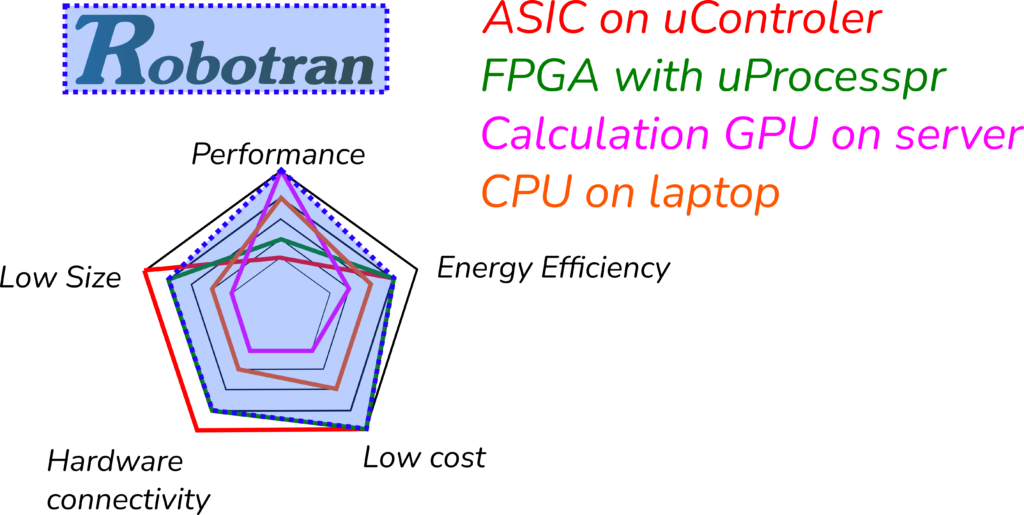
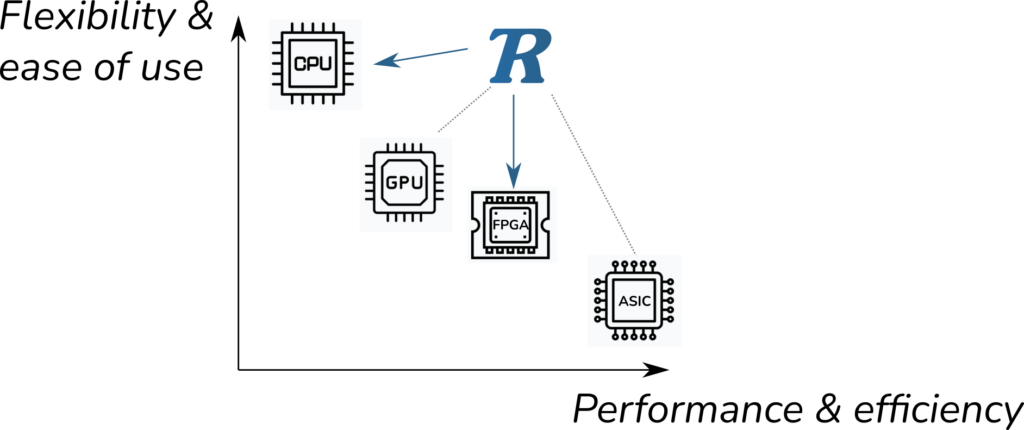
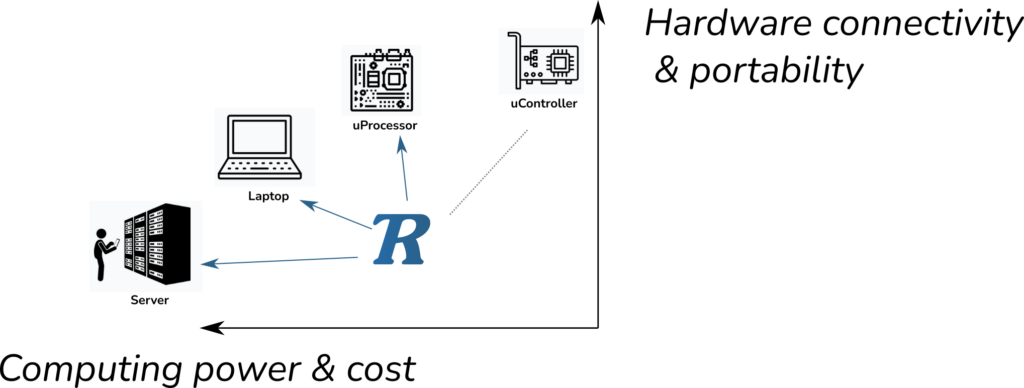
The two figures below illustrate the known implementation of Robotran on specific hardwares, sorted by flexibility & ease of use versus performance and efficiency, plus Hardware connectivity versus computing power & cost.
Those implementations often use the ROSBOTRAN tool. This allows Robotran to communicate to hardware such as sensors, actuators,… Interface with Arduino is possible. Implementations tested on platforms such as Raspberry Pi3B+, Odroid XU4, SeedOdyssey, IntelJoule x570, Intel Cyclon IV FPGA, …
Nicolas Docquier, Olivier Lantsoght, Sébastien Timmermans, Paul Fisette.