
Abstract :
The efficient code generated by Robotran enables to run simulations fast enough to include the human in the loop. For this purpose, a vehicle simulator with haptic torque feedback was developed. A steering wheel is connected to a realtime Robotran simulation. This allows to analyze the pilot perception while driving different vehicles.
Keywords :
Mechanics – Vehicle – Haptic – Mechatronics – Realtime – Haptic HIL vehicle simulator
Previously, thanks to the symbolic code generated by Robotran in C language, it was possible to simulate in realtime the dynamics of road vehicles like motorbike, kart or car.
However, we usually used pre-set trajectories or controllers to reproduce, as precisely as possible, the behavior of the driver. Despite all the carefulness given to driver models, it is impossible to reproduce perfectly the driver behavior and its influence on dynamics.
In order to enrich the study, a complete driver interface device has been implemented. In other words, this project aims to include the driver inside the simulator environment based on Robotran.
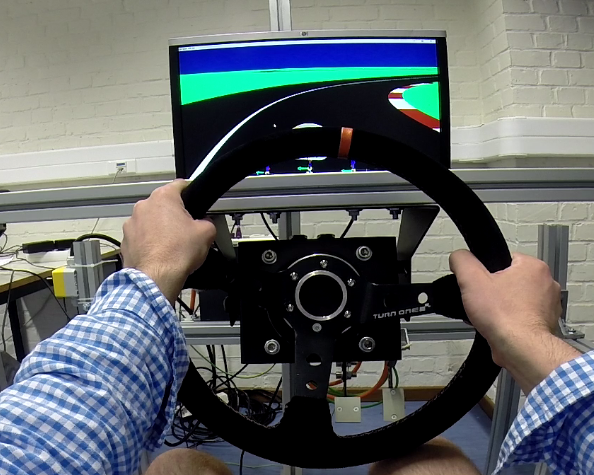
The main part is an actuated steering wheel linked in real time with the Robotran simulator, through ROSbotran coupling. The device measures the wheel motion and send this information to the simulator which computes the torque feed-back to apply to the driver.
Furthermore, extensive development has been done to ensure a good quality of feeling.
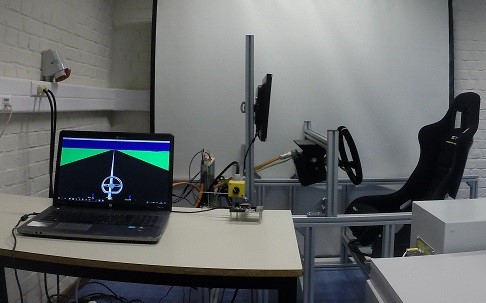
In particular, we selected a direct drive system to avoid all parasitic slacks, and frictions. In the same way, both hardware and software are developed to obtain short communication time between host computer and the wheel. Brakes and acceleration pedals are also instrumented.
First, the driver is better included in the simulation. Second, the results are closer to reality. Besides, this project of a haptic HIL vehicle simulator is based on several master theses realized at EPL.
For illustration purpose, modifying the caster angle of the car simulated in the prototype allows to directly see the influence of this parameter to the driver behaviour. Moreover, the haptic torque feedback is automatically adapted to the the new configuration.
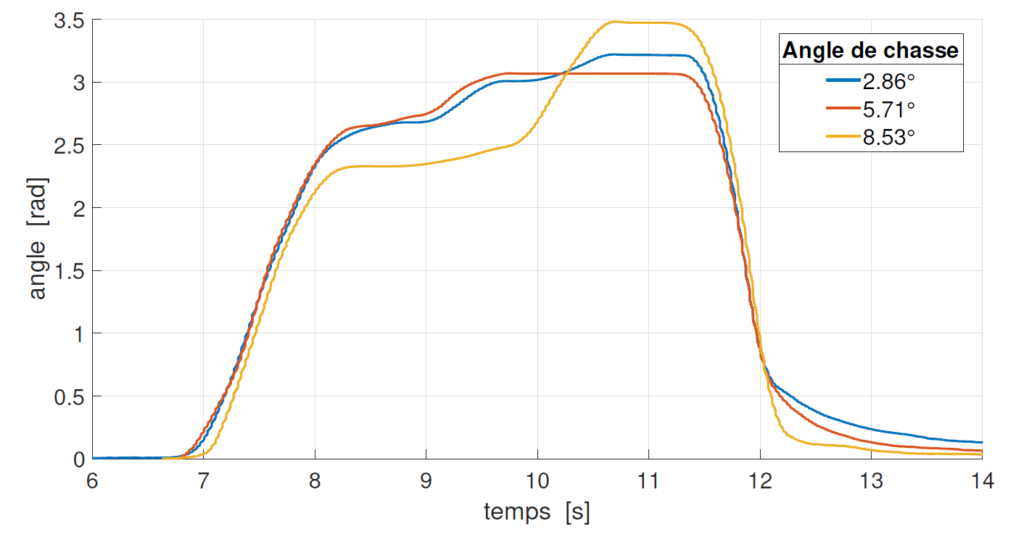
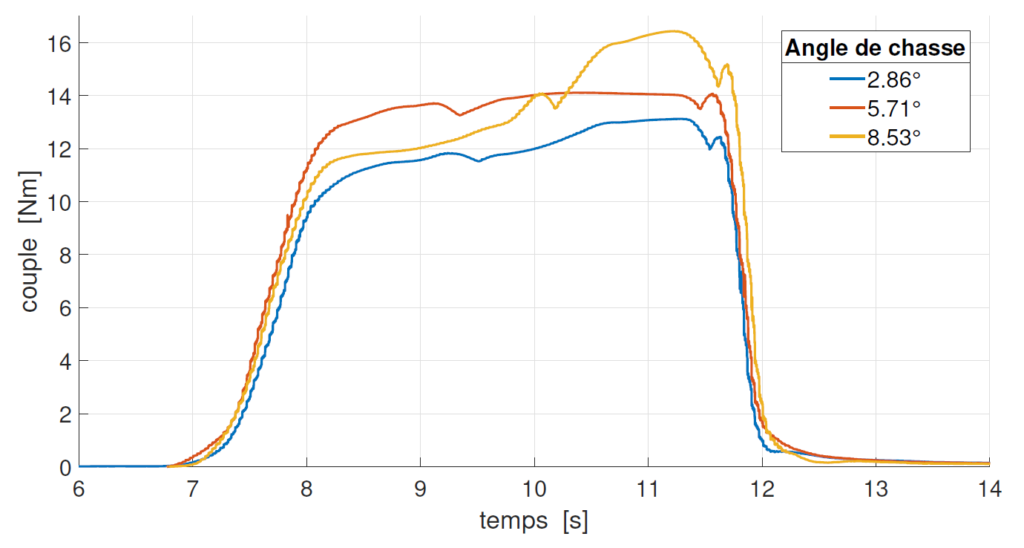
The main conclusion that can be drawn from these graphs is that a change in caster angle will result in a change in torque in the steering wheel.
Indeed, the greater the caster, the greater the self-aligning torque.
Those nice results concretely illustrate the interest of having a multibody model running in real-time inside a haptic feedback device. of course, any physical parameters can easily be modified with the MBS model !
See also https://www.robotran.be/applications/labo-dyn/ and https://www.robotran.be/works/haptic-piano-key/
ROSbotran tutorial available at https://robotran-doc.git-page.immc.ucl.ac.be/rosbotran_tutorial/
François Huens, Théo Tuerlinckx, Sébastien Timmermans, Romain Poletti, Aubain Verlé, Nicola De Lellis, Quentin Materne, Martin Vanderwegen, Nicolas Docquier, Paul Fisette.