Abstract:
A reduced-scale three-wheeled tilting vehicle prototype has been developped. It allows to analyze the control of a narrow track vehicle. Several sensors equip the prototype. The multibody model is compared with experimental results.
Keywords: Narrow track vehicle ; Vehicle Dynamics ; Multibody Modeling ; Direct Tilting Control
The interest in Narrow Tilting Vehicle (NTV) has increased recently as it offers the possibility to tackle both traffic congestion and carbon emissions.
With a small footprint, low weigth and narrow track, these vehicles are likely to increase the utilization of existing freeways and parking facilities while being energy efficient. Their large height-to-track ratio leads to a reduced stability and requires tilting towards the inside of a turn while cornering.
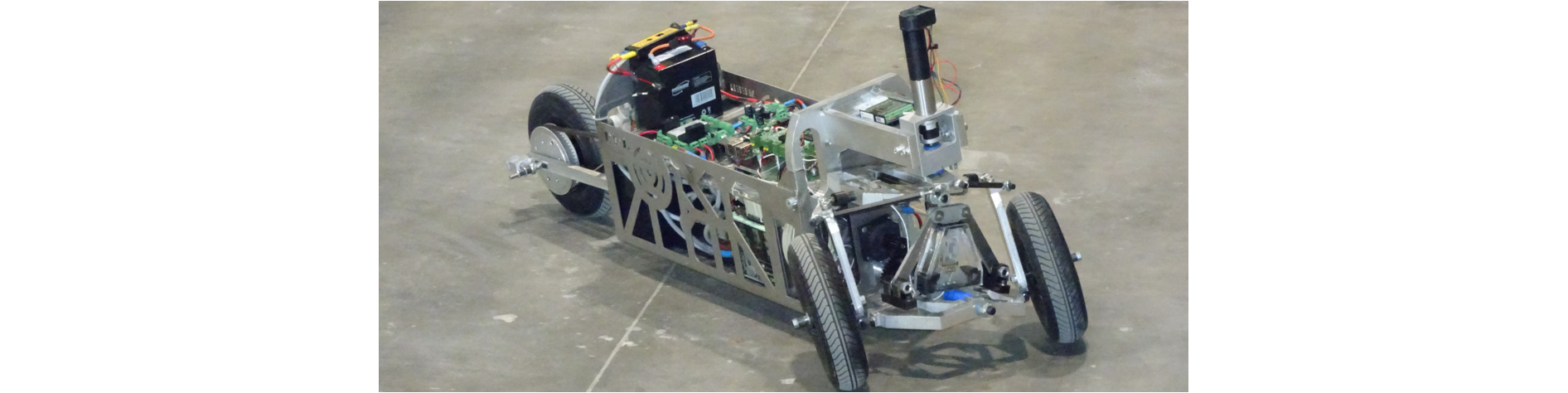
For the purpose of research about control of these vehicles, a reduced-scale three-wheeled tilting vehicle prototype has been built.
With the help of multibody simulations, this demonstrator allows to analyze dynamic performances and validate the conception.
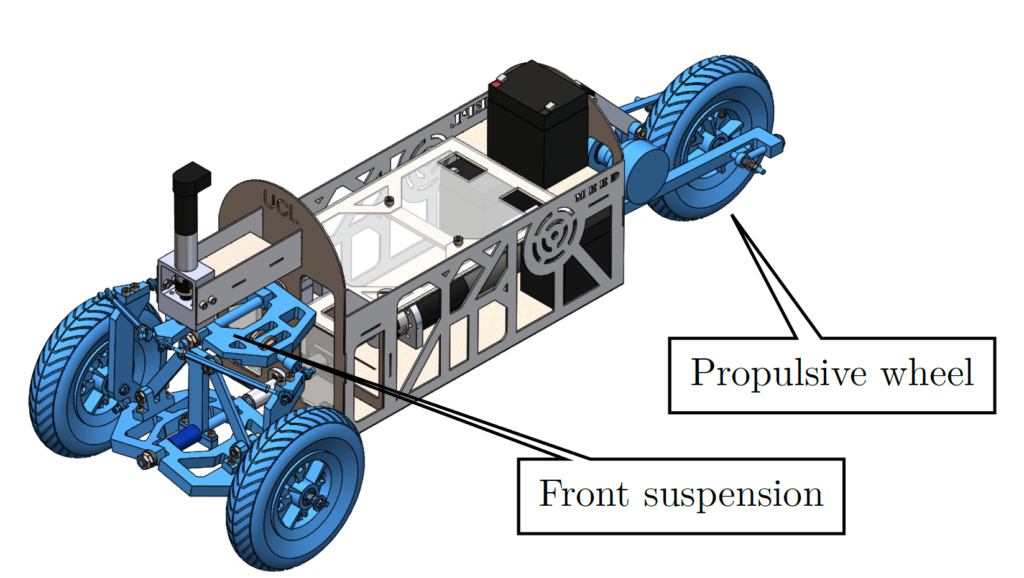
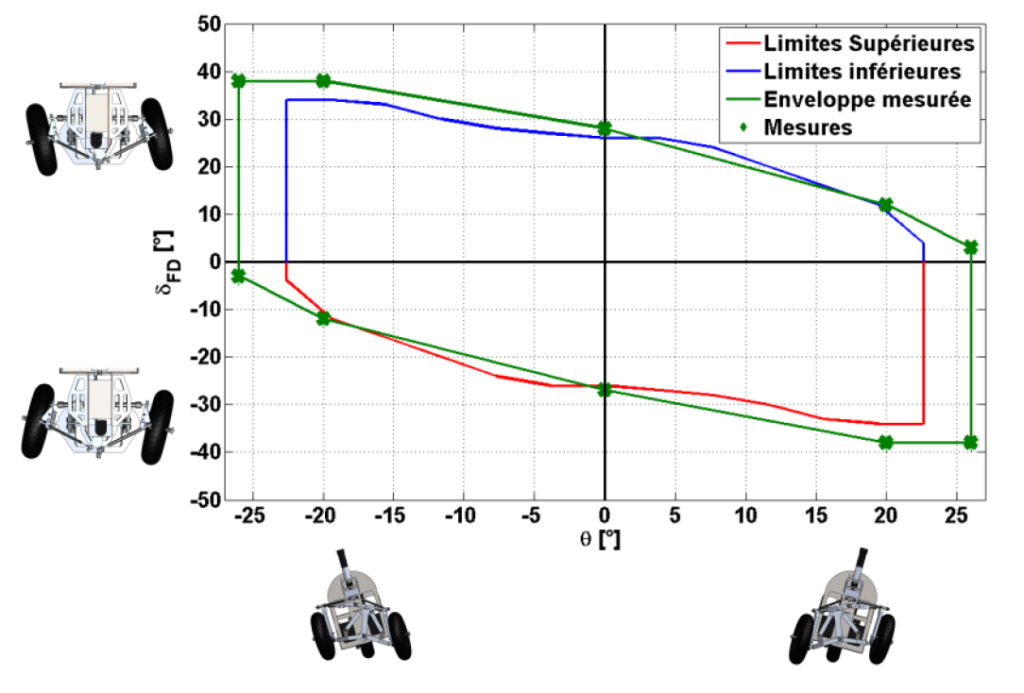
Mechanical limits of the vehicle steer and tilt at the front suspension are estimated thanks to the modelisation and compared with experiments.
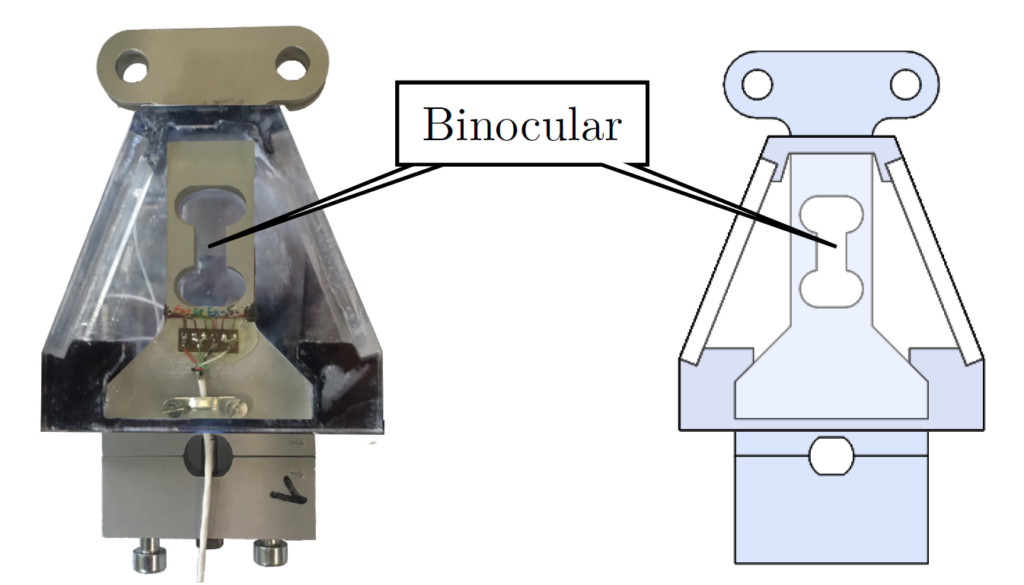
First, a strain gauge is put on the front binocular to provide a torque information associated with the actuated tilting degree of freedom of the vehicle.
We designed this sensor in accordance to the existing “T” shaped load struture of the vehicle.
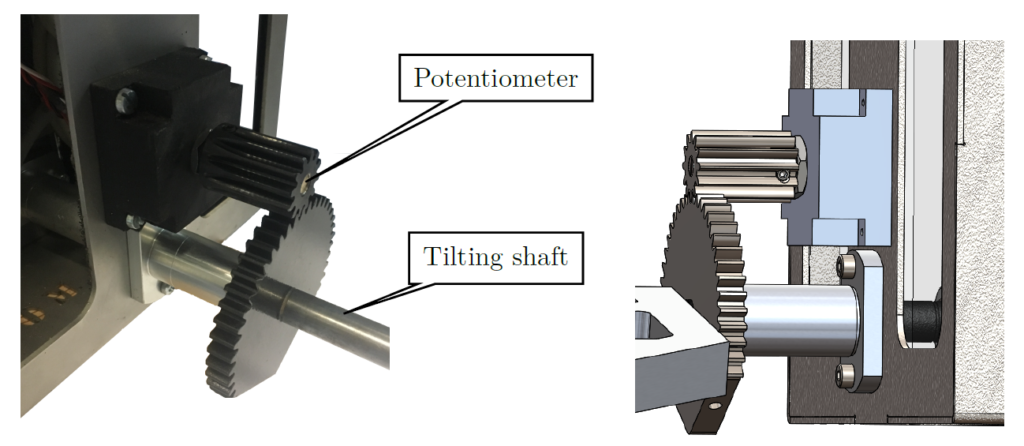
Moreover, an other sensor has been built to measure the absolute value of the tilt angle of the frame of the demonstrator.
This position is thus measured directly on the tilting actuator, by means of a gear ratio, transmitting this motion to a potentiometer
We assessed the behavior of the vehicle in a curve, using two control schemes: STC and DTC
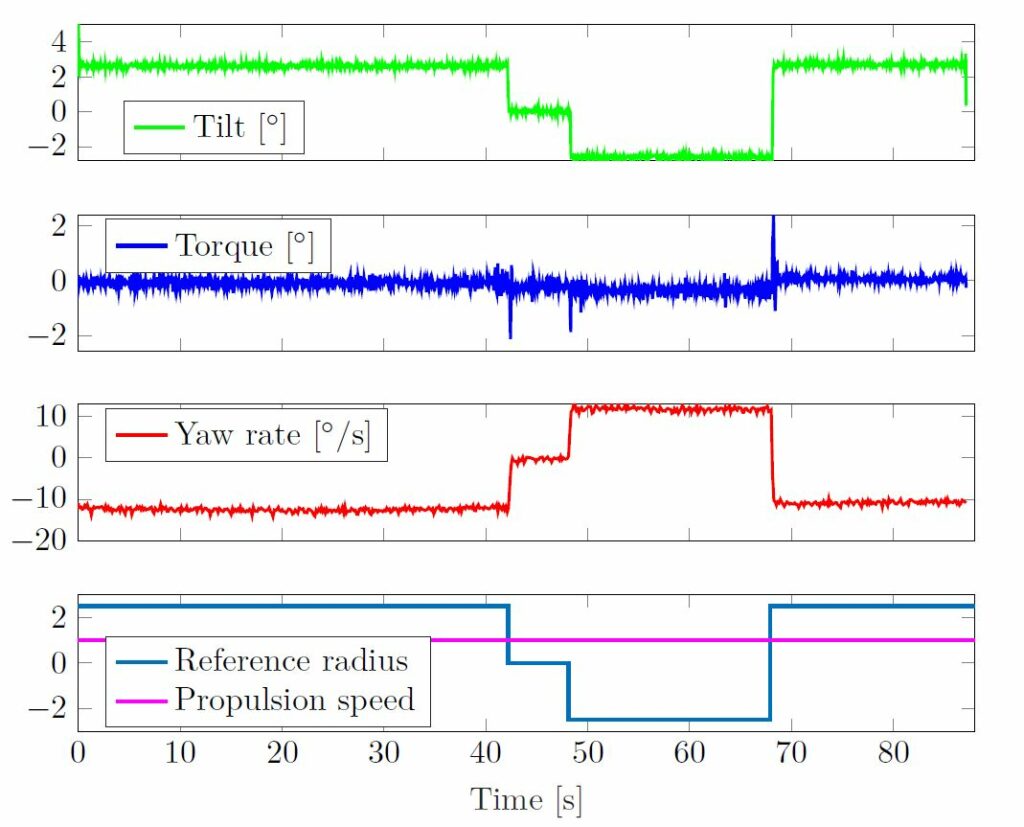
The prototype moves forward at a constant speed of 1 m/s, while the curvature radius is set between 0m (straight line) and ± 2.5m. For the DTC control, is gives the figures below for an corner entry:
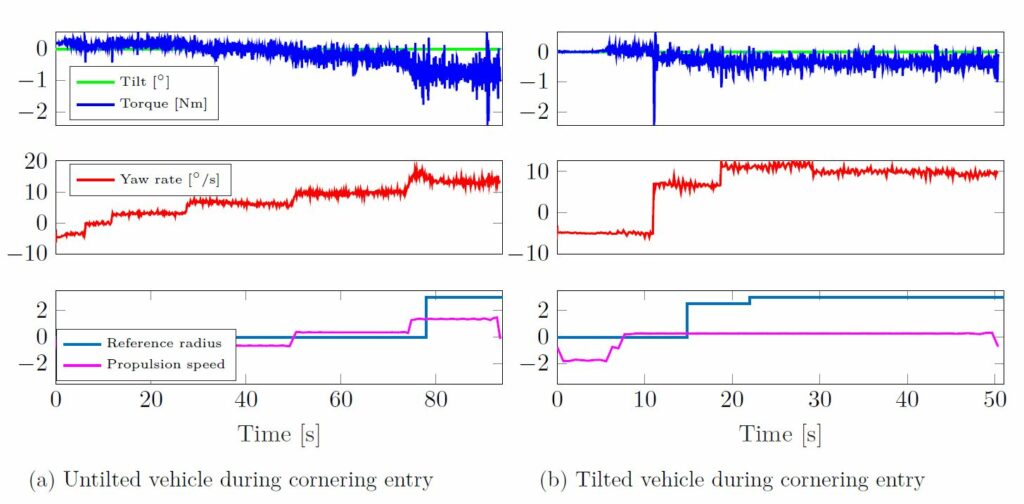
For varius curvature radii, the vehicle is able to follow the reference:
Finally, the prototype does not currently allow to test the STC control scheme. Indeed, it would need to disconnect the tilting actuator from the rest of the vehicle.
See also other experimental applications of Robotran : https://www.robotran.be/applications/labo-dyn/
Quentin Docquier, Pierre Ghijselings, Sébastien de Longueville, Sébastien Timmermans, Paul Fisette.