Abstract:
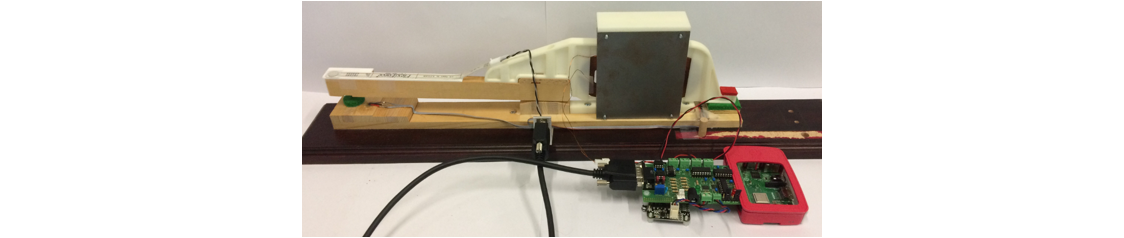
An haptic piano key prototype actuated by a custom-made linear actuator is proposed. Its purpose is to enhance the touch of digital pianos by reproducing the force feedback of an acoustic piano action.
Keywords: Piano action – Mechanics – Mechatronics – Haptics
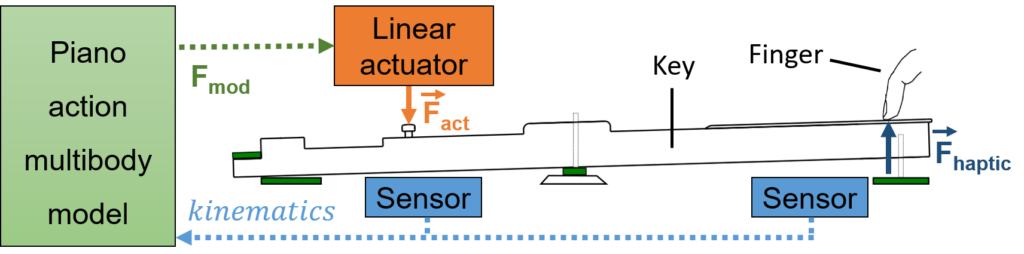
Firstly, the approach exploits a multibody model to compute the action dynamics and the corresponding force on the key in real time.
More specifically, the haptic device uses a grand piano model that includes the five action bodies, its geometry and the specific force laws.
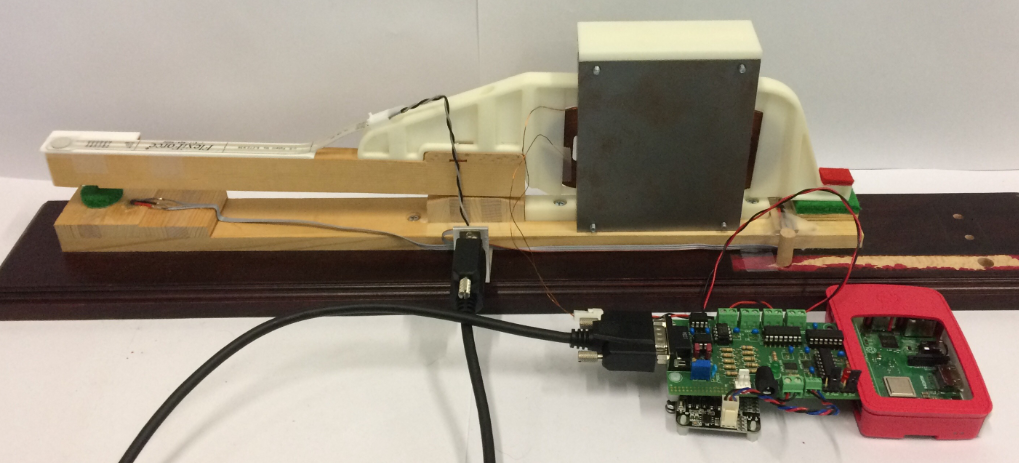
The prototype comes from a real acoustic piano key for which the action is replaced by the designed actuator
In adition, the linear electromechanical actuator fits within one-key width.
Moreover, the actions model are based on the Robotran multibody models:
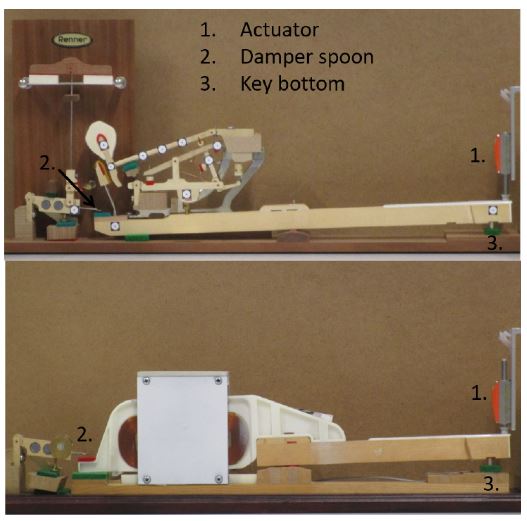
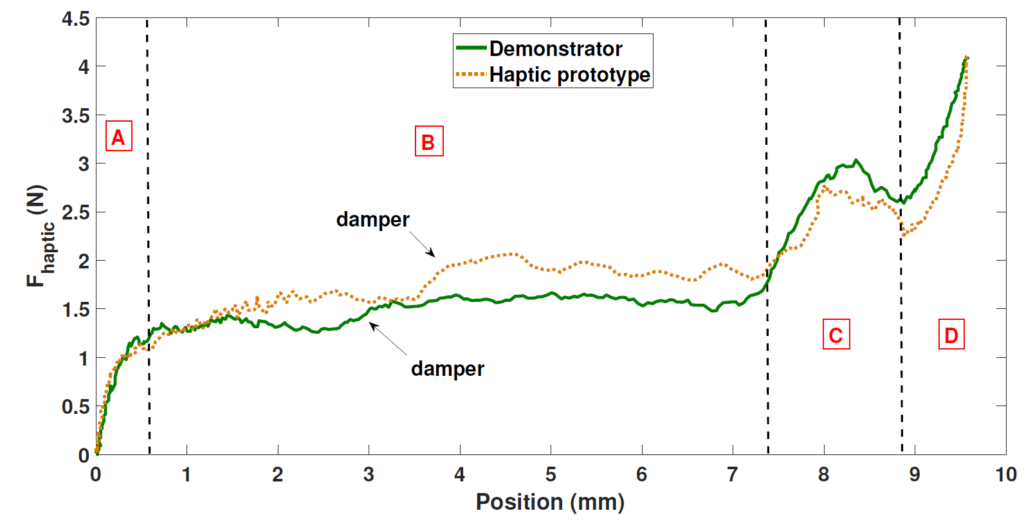
To characterize haptic force, an external actuator has been used to apply the same profile on the demonstrator and the prototype.
The figure below shows the haptic force at the key tip versus key tip vertical position. You may find results explanations in the paper.
First, the properties of the key is the same as its acoustic equivalent.
Furthermore, the multibody approach allows to mimic the dynamics of a real action. In addition, it allows to (de)regulate it or even to swap between different types of action.
Moreover, the homemade actuator is experimentally validated and answers some challenging problems.
In conclusion, digital pianos would greatly benefit from these three advantages.
Timmermans, Sébastien. Haptic key based on a real-time multibody model of a piano action. Prom. : Fisette, Paul ; Ceulemans, Anne-Emmanuelle http://hdl.handle.net/2078.1/254404
Timmermans, S.; Dehez, B.; Fisette, P. Multibody-Based Piano Action: Validation of a Haptic Key. Machines 2020, 8, 76. https://doi.org/10.3390/machines8040076
Sébastien Timmermans, Bruno Dehez, Paul Fisette, Anne-Emmanuelle Ceulemans