Abstract:
One of the earliest national schools of piano making, equipped with the so-called Prellzungenmechaniken, appeared in the second half of the 18th century in the regions of Vienna and southern Germany. This project focusses on the study of two of these actions (designed by Johann Andreas Stein and Anton Walter, two makers of keyboard instruments of the 18th century) which were of the greatest importance historically speaking. A ROBOTRAN multibody model of the two types of actions has been conceived so as to understand and compare their behaviours and to confront the simulation results with the piano makers feeling, with a real organological approach.
Keywords:
Piano action, organology, multibody dynamics
The modern piano is known as a standardised instrument, built almost exactly the same way all over the world. However, during the 18th and part of the 19th century, when some major pieces of today’s repertoire were written, important differences in the design existed according to the geographic origin of the instruments.
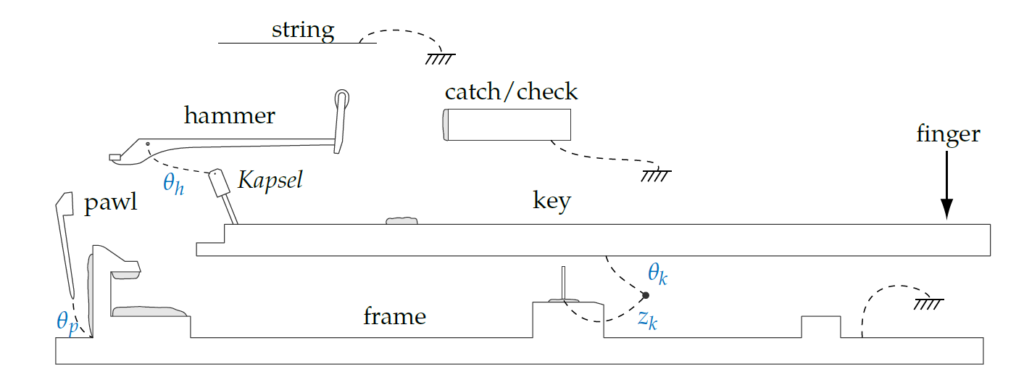
One of the earliest national schools of piano making, equipped with the so-called Prellzungenmechaniken, appeared in the second half of the 18th century in the regions of Vienna and southern Germany. The Prellzungenmechanik is a mechanism (or piano action) which transmits the motion of the finger from the key to the string. Roughly speaking, Prellzungenmechaniken can be divided in two types of schools. The first type, called ‘German’ actions, are attributed to Johann Andreas Stein, while the later ‘Viennese’ actions, a modification of the German actions, were devised by Anton Walter. The fact that the two types co-existed is a good indication that both designs had their own advantages. This project focusses on the study of these two actions which were historically speaking of the greatest importance. Via an experiment-based multibody approach, both designs and attempts to explain why Walter changed Stein’s traditional pawl disposition. To this end, a piano action with interchangeable pawls has been conceived.
An important fact to consider when studying piano actions is that these mechanisms are highly dynamic systems for which a quasi-static observation cannot reveal their behaviour when they are used under normal playing conditions. High-speed imaging of the actions revealed part of their true functioning, but was unable to provide the interacting forces between parts of the mechanism. It is believed that these forces are of prime importance for the identification of the advantages of each type of action.

Consequently, a multibody model of the two types of the actions has been conceived so as to compute the desired data. Special care has been taken to incorporate and to refine the following features in the model: constitutive laws of the leather and the cloth, detection of the subsequent intermittent contacts, a flexible hammer shank and a vibrating string. The results of the multibody model, coupled with experiments on the real actions, support the theory that Walter actions were probably devised to work under heavier conditions than Stein ones.
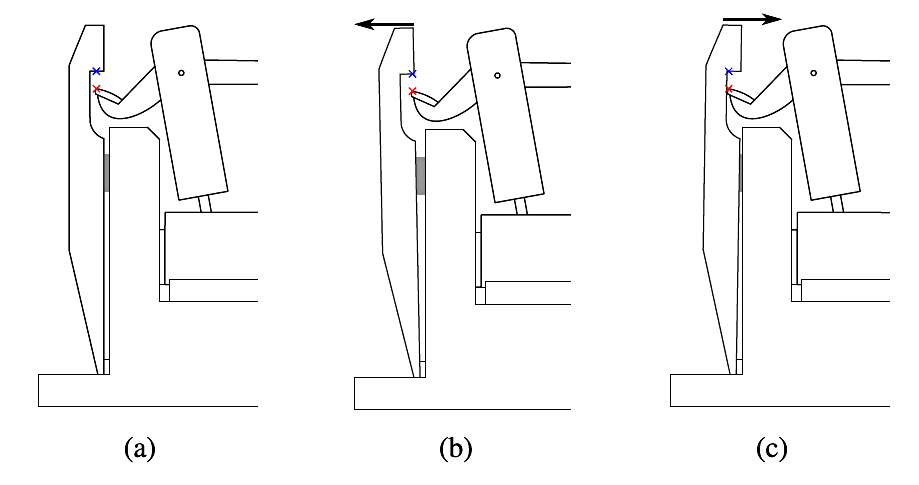
In those Vienese actions, the regulation of the escapement height is done by changing the initial inclination of the pawl. As The escapement height is regulated by changing the position of the pawl stop (thin grey rectangle in the figure). Compared to the reference case (a), escapement-height increases when the pawl is away from the pianist (b), and decreases when the pawl is positioned closer to the pianist (c).
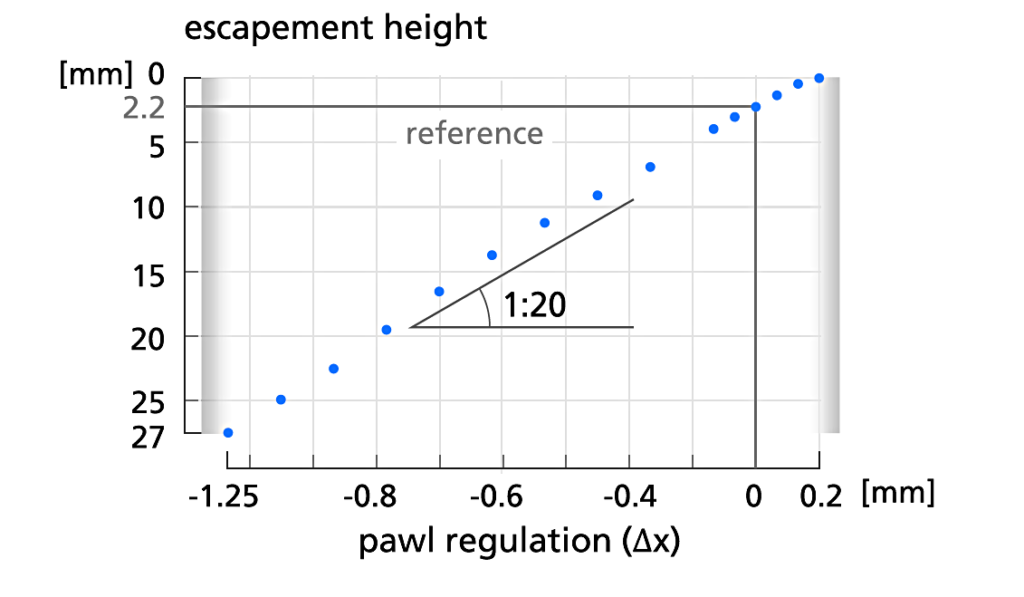
According to the next result, the relationship between the pawl stop and the dynamic escapement height is quasi-linear. Negative displacement values indicate a shift of the stop to the left. The grey zones indicate when the action is not working anymore.
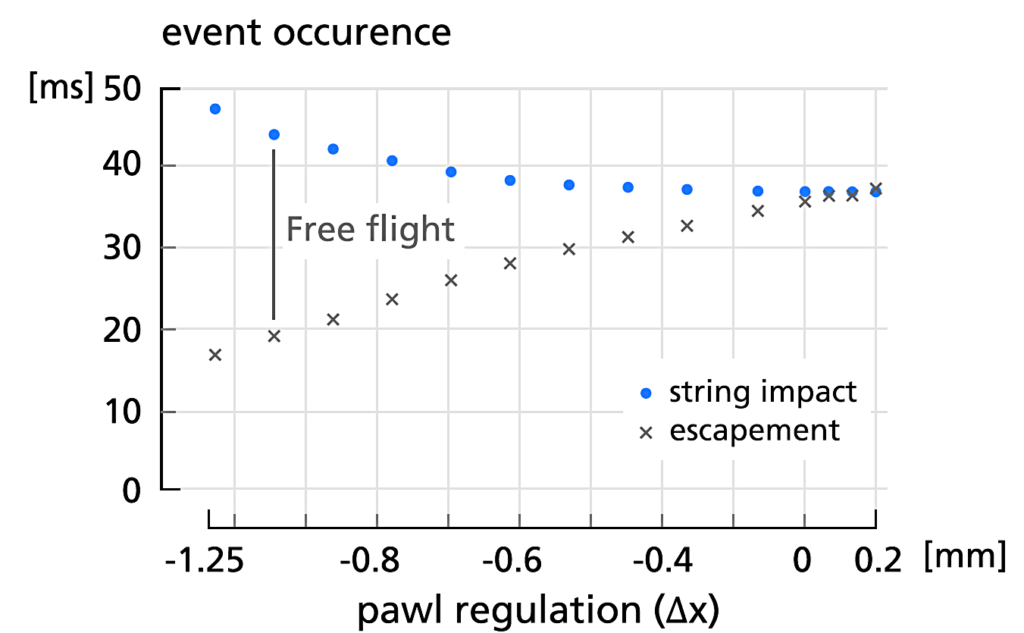
As illustrated in the next figure, the moment (in ms) at which the hammer escapes and at which it hits the string is conditioned by the regulation of the pawl. The free flight of the hammer is the period between those two events, when the hammer flies independently of the action of the piano.
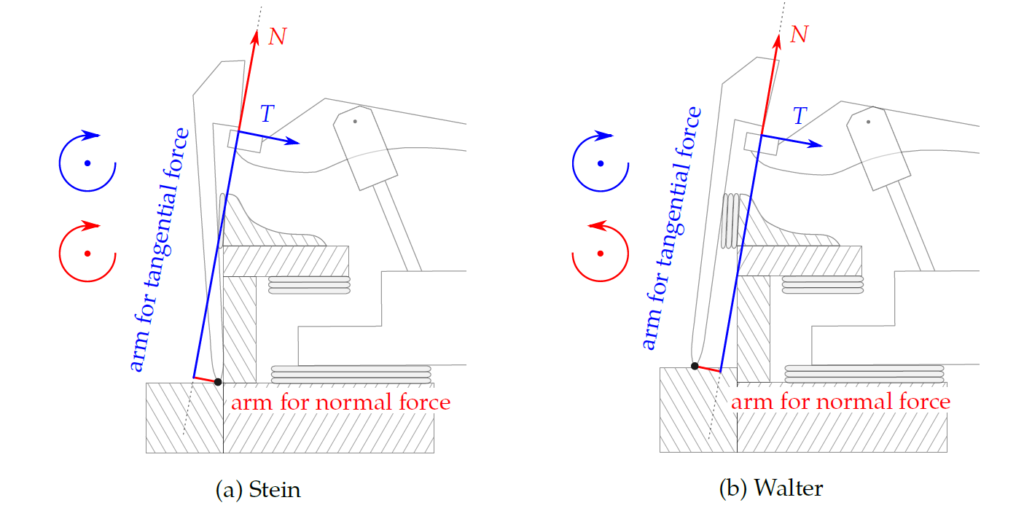
As a last illustrative result, let us compare the Stein and Walter actions in terms of pawl shape and inclination. The Prellzungenmechanik can be compared to a ratchet mechanism in which the ratchet is the hammer beak, hence the name given to the pawl. Two types of actions can be defined according to their pawl;