Abstract:
A multibody model of an upright piano action is presented, that has been experimentally validated via high speed camera. First, the model takes all the bodies into account as well as specific felt force laws and body geometries to deal with intermittent contacts. In addition, experimental tunings of model parameters have been undertaken. Furthermore, simulations of the model allow, among others, to estimate the maximal playing frequency and a minimal input force on the key to produce a sound. More specifically, the bridle strap and butt spring usefulness are discussed, showing the interest of the multibody modeling approach for studying piano actions.
Keywords: Piano action – Mechanics – contact model
In pianos, the sound is produced by the impact between the hammer and the strings. A mechanism – called piano action – propels the hammer according to the key motion which is controlled by the pianist.
Upright pianos contain an action which differs from that of the grand piano. Both complex, these two actions can be modelled through multibody methods to analyse their behaviour over different impulses.
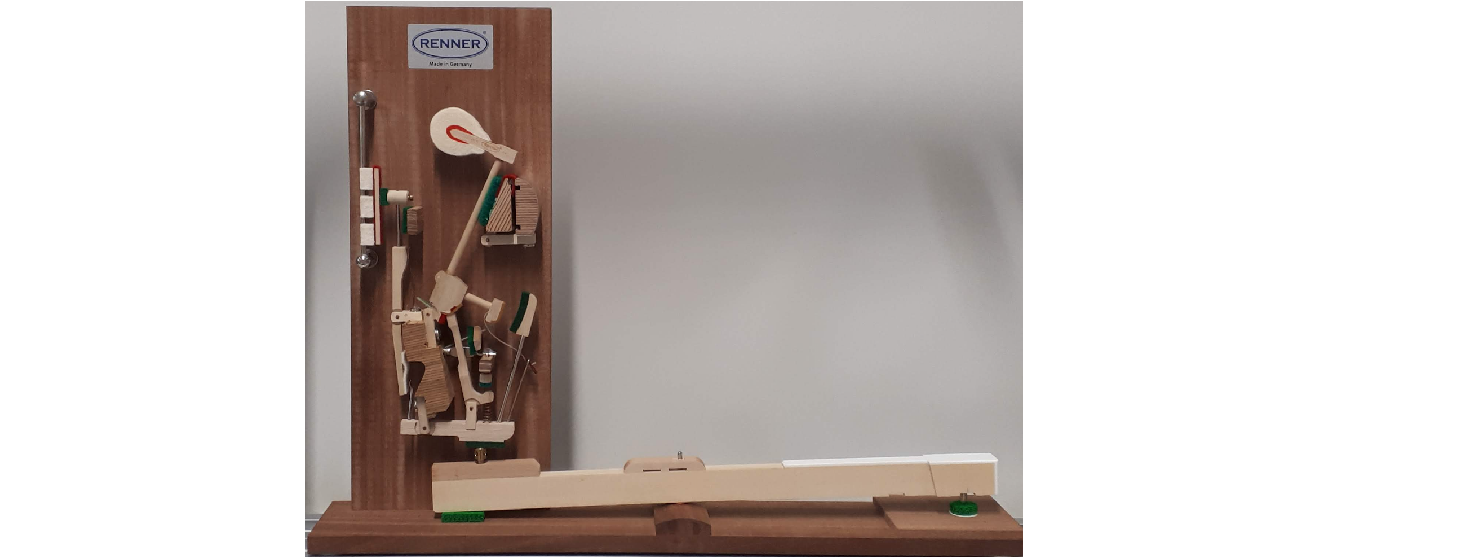
The multibody model is based on a demonstrator action, see Fig. 1. The latter has been used for both physical parameters estimation and experimental validation. Besides, an equivalent CAD replica of that action has been carried out.
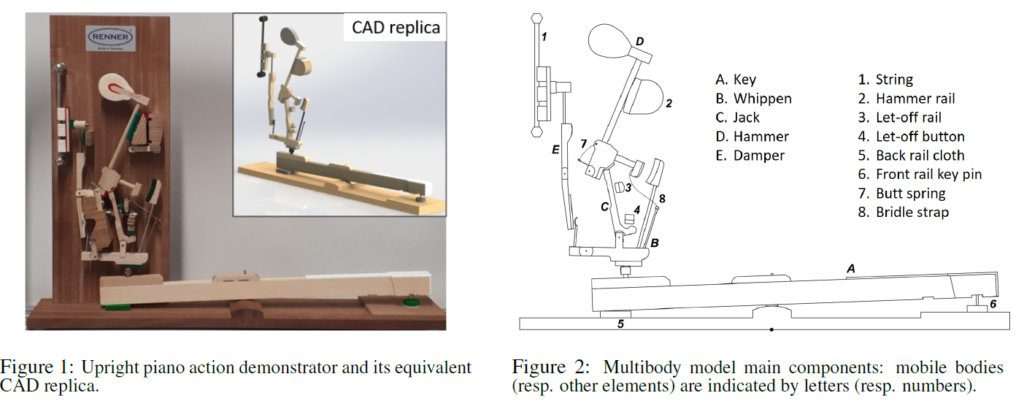
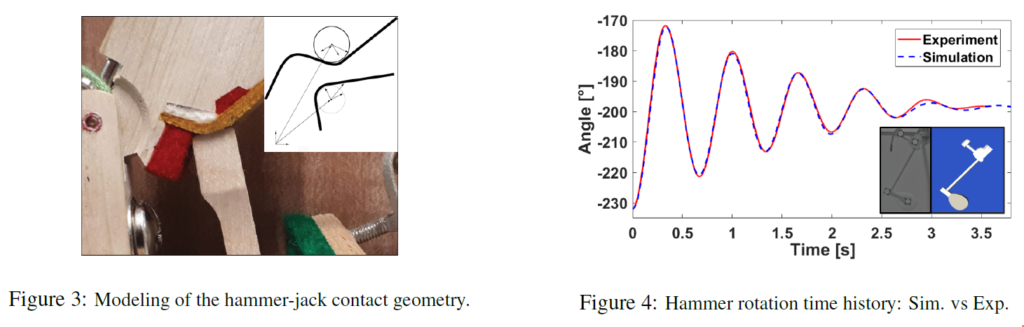
First, the model consists of five mobile bodies, several stops and springs shown in Fig. 2, all moving in a vertical plane. Second, the model considers only rigid bodies and no backlash in the joints. Third, a simplified contact geometries with corresponding bodies shapes are approximated by circular arcs or line segments to find the contact patch location and to compute the reaction forces.
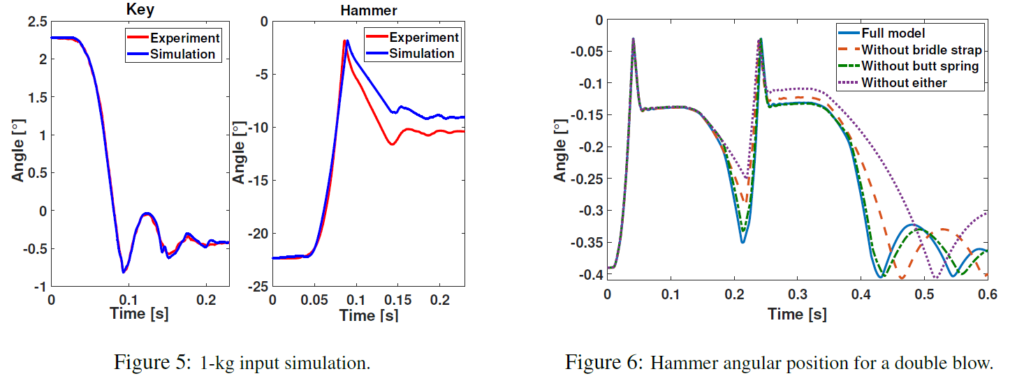
Experimentations conducted on subparts of the model have allowed us to identify forces laws coefficients. For example, the friction of the hammer rotating joint has been characterized by identification between simulations and experiments, depicted in Fig. 4, using high speed camera tracking at 2000 fps.
Whereas, with a 1-kg mass as input, the model reacts similarly as the demonstrator for the pre-impact phase [0;0.1] s, the imposed key motion causes the hammer to hit the string a bit too early, around 0.1 s in Fig. 5, but in a quite satisfactory manner, given the modeling parameters uncertainties.
The importance of the bridle strap and butt spring – see Fig. 2 – is illustrated in Fig. 6. They both help the hammer to travel back faster to its rest position so that key strokes can be repeated faster. This result is original since it refers to specific elements whose role is not clearly explained, even by piano tuners.
See also other experimental applications of Robotran : https://www.robotran.be/applications/labo-dyn/
François Leroy, Sébastien Timmermans, Paul Fisette.