Benchmark projects
No matches found
Benchmarks are standardized reference multibody systems used for modeling verifications and numerical validations. Robotran benchmarks have two distinct purposes:
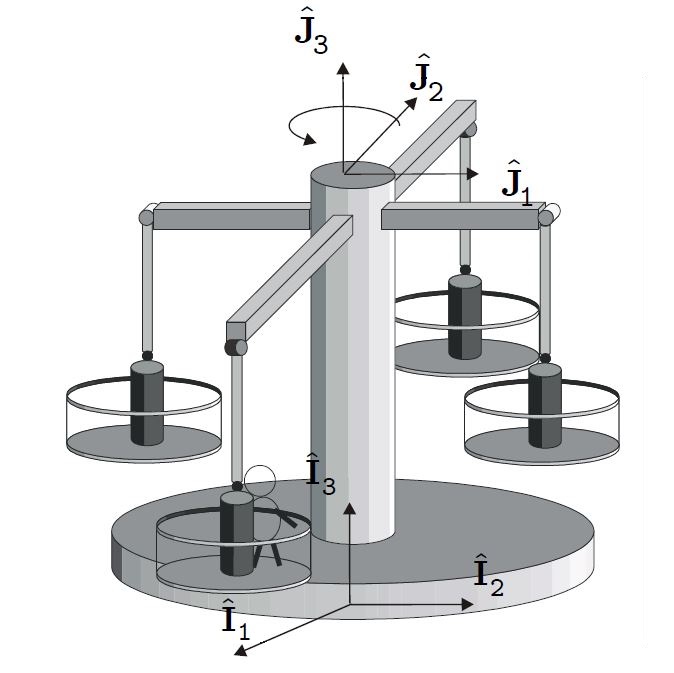
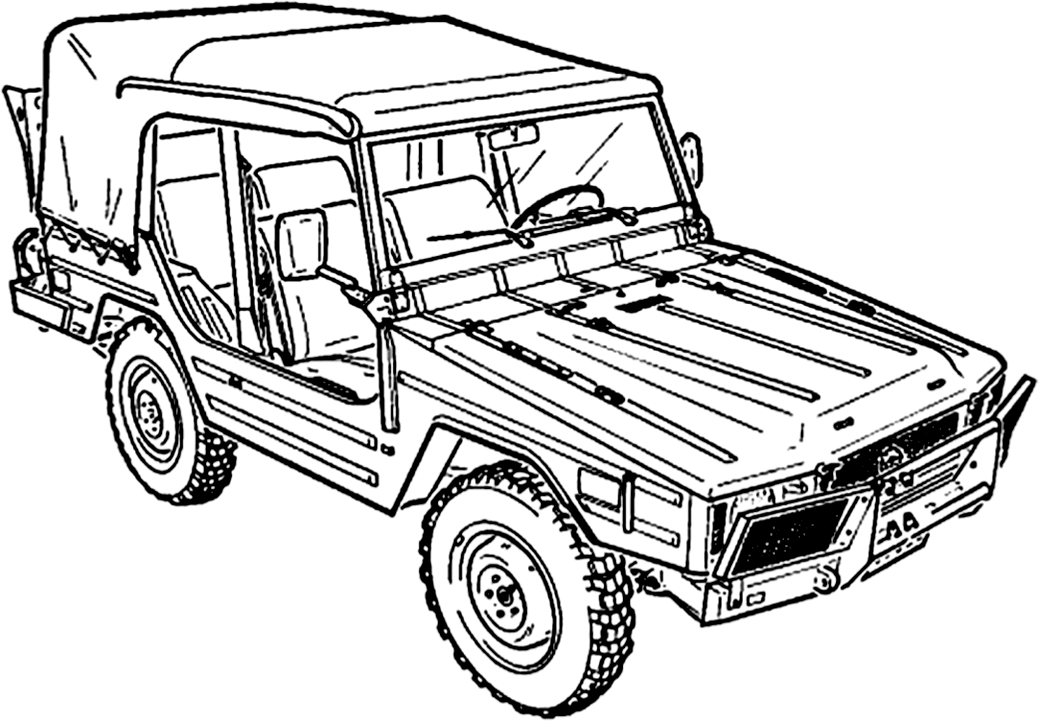
In addition to the validation purpose, Robotran benchmarks also allow to highlight particular modeling features of the studied systems, i.e. tire/ground contact on a non-flat surface or sophisticated wheel/rail contact with complex profiles, complex 3D kinematic loops of bodies, etc.
Illustrated below are some projects for which multibody benchmarks have been carried out with Robotran.