Abstract :
The merry-go-round is one of the most famous attraction. Even if it is well known, the forces induced in the mechanism might be complicated to compute by hand. This project will use Robotran to evaluate the internal forces of each arms and the acceleration of the user.
Keywords :
Merry-go-round
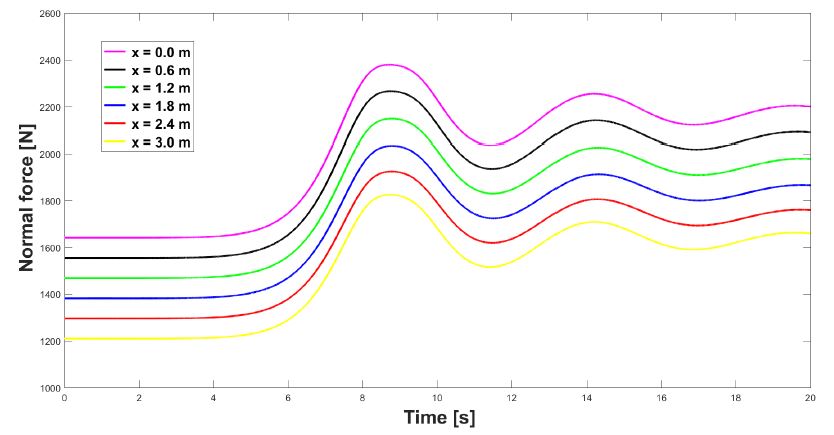
Because the merry-go-round has to be safe, the internal forces of the arms have to be well known in order to design the structure correctly. From the material used to the geometry and the size of each parts, to know these forces allows the manufacturer to save money, ensure the security and to evaluate the elastic and plastic deformation of the arms.
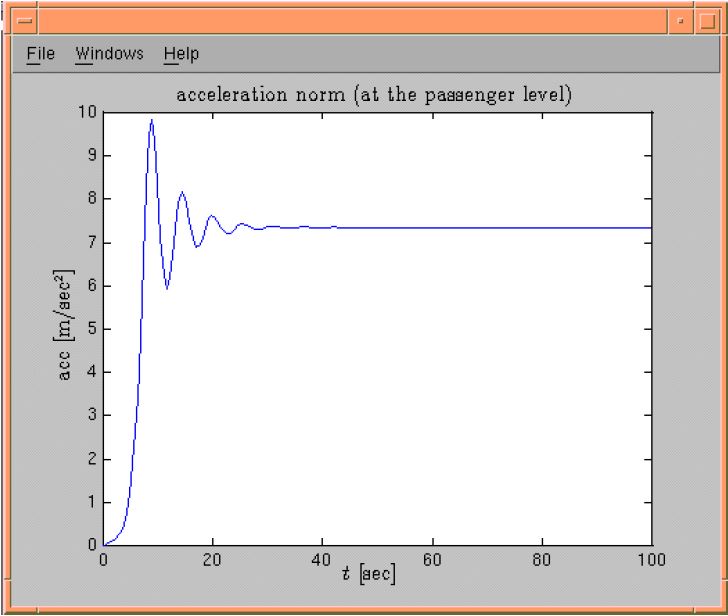
Furthermore, the user should not be sick while using this attraction. We know that a human is really sensitive to the acceleration and the frequency. To ensure the well being of the user, one might be interrested to know how nacelles will react according to the rotational acceleration and the rotational speed.
Originality of the problem: This problem allows us to introduce the concept of driven variables
and the modeling of multi-degree of freedom joints. The concept of a kinematic sensor is a further
novel feature. Moreover, this problem allows us to stress the important influence the choice of
initial configuration can have on the determination of the equilibrium configuration.
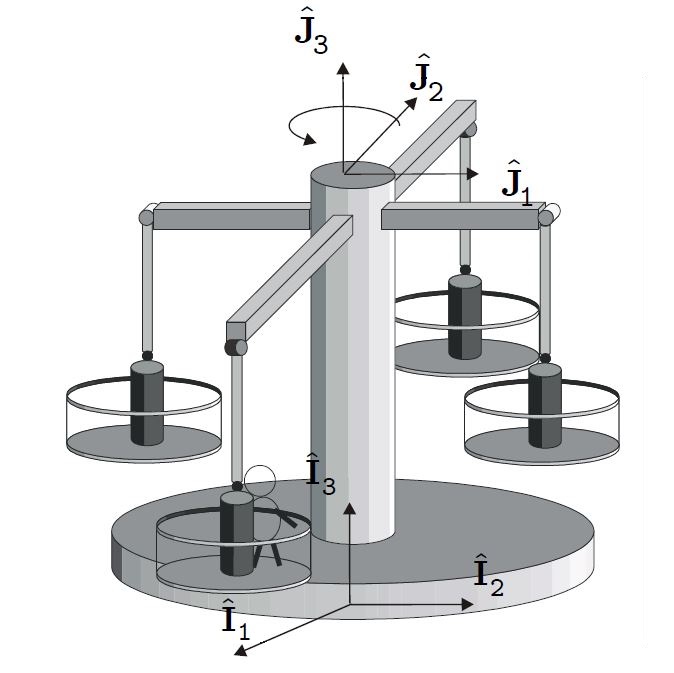
This project is composed of ten bodies :
And nine joints :
And severals assumptions will be made to be closer to the reallity:
As results, we can have the followings :