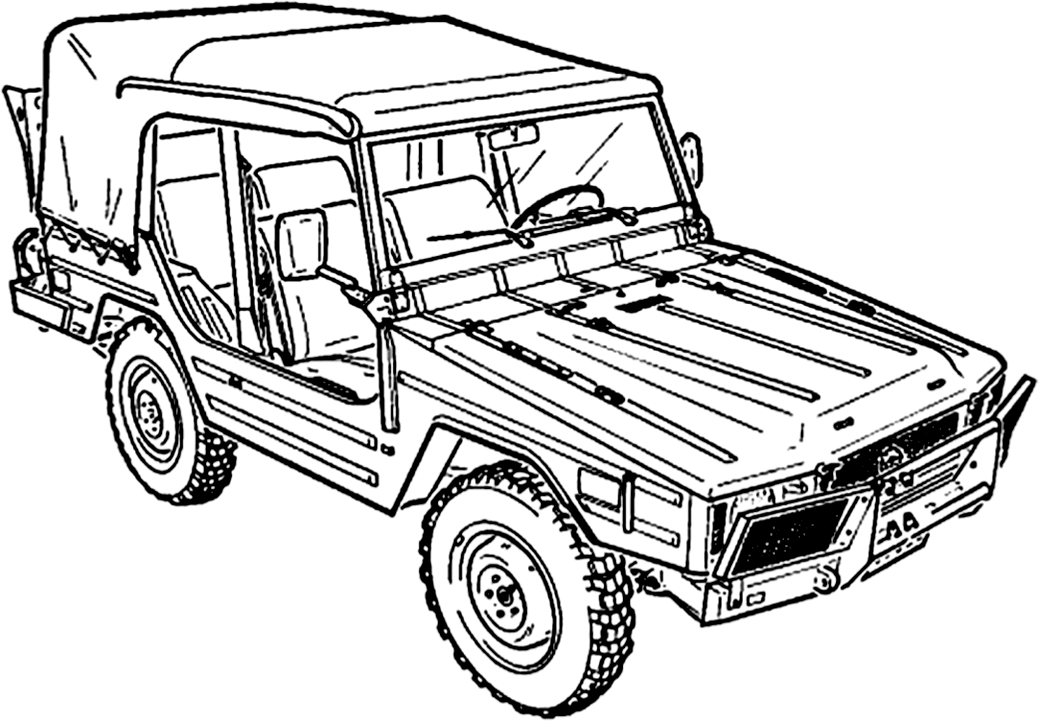
The Bombardier Iltis vehicle was published in 1993 in the journal of the IAVSD [1] . This system allows to comparison of different modelling approaches and implementations with identical inputs. The benchmark provides all required data’s (dimensional and dynamical) and the tire-road contact law to be used.
The benchmark asks for the computation of an equilibrium state, of the modal analysis and of multiples dynamic simulations. The dynamic simulations include non-flat road profiles and various steering manoeuvrers.
keywords : Vehicle, Dynamic, Equilibrium, Modal, Contact
The model of the Bobmardier Iltis vehicle consists in:
The benchmark ask for the following results:
The simulations results obtained with Robotran matches the solutions obtained in the benchmark by several software. Some of the results are shown below to illustrate the matches. Results from FASIM, MEDYNA, NEWEUL and SIMPACK come from [1].
| Interaction | Dim. | ROBOTRAN | FASIM | MEDYNA | NEWEUL | SIMPACK |
| cabin: vert. displacement | mm | -7.083 | -7.230 | -7.078 | -7.100 | -7.094 |
| cabin: pitch angle | ° | 0.1465 | 0.1767 | 0.1438 | 0.1509 | 0.1468 |
| right front tyre | N | -3831.31 | -3831.46 | -3829.23 | -3534.63 | -3831.32 |
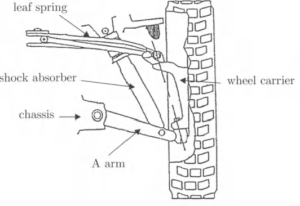
| shock absorber right front | N | -335.29 | -335.24 | -334.67 | -336.54 | -335.51 |
| leaf spring right front (force element) | N | -3068.62 | -3068.5 | -3067.13 | -3071.13 | -3069.15 |
| leaf spring right front (rod) | N | -1408.51 | -1404.20 | -1372.19 | -1406.13 | -1404.68 |
In the benchmark the eigenvalues are computed either with linear tyre parameters and with the complete CALSPAN tyre model (linearization is done by the software). Only the results with the complete CALSPAN model are illustrated below. The results of Robotran are in bold, the comparison is done with SIMPACK resutls..
| Mode nb. | Description | Freq. (Hz) | Damping ratio (%) | Freq. (Hz) | Damping ratio (%) |
| 7/8 | cabin lateral / roll out of phase | 1.44 | 37.57 | 0.91 | 69.38 |
| 9/10 | cabin pitch | 1.28 | 44.34 | 1.63 | 38.75 |
| 15/16 | Wheel hop: cabin bounce | 12.84 | 34.53 | 13.88 | 34.29 |
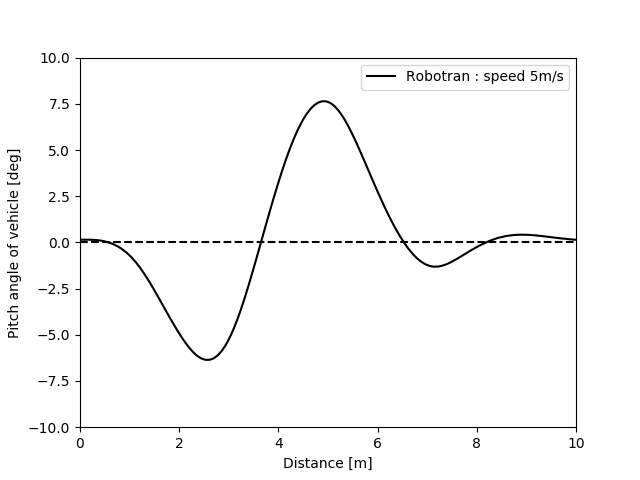
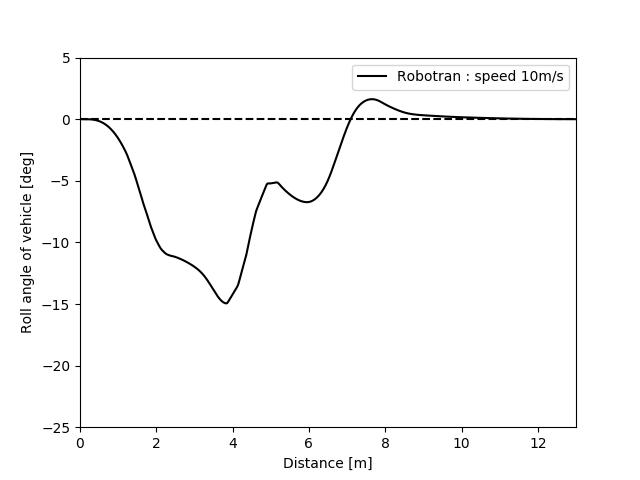
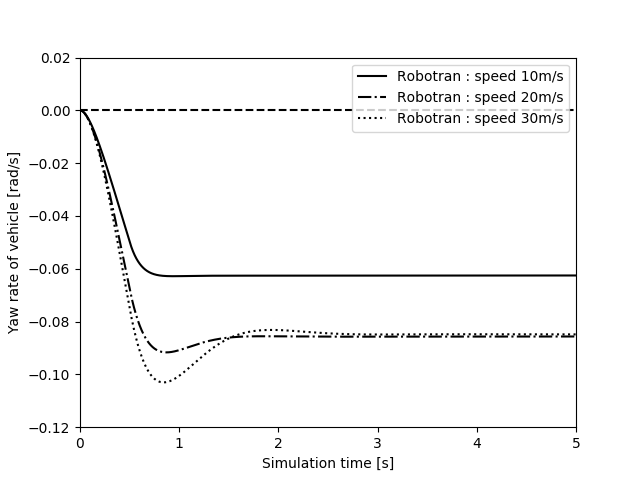
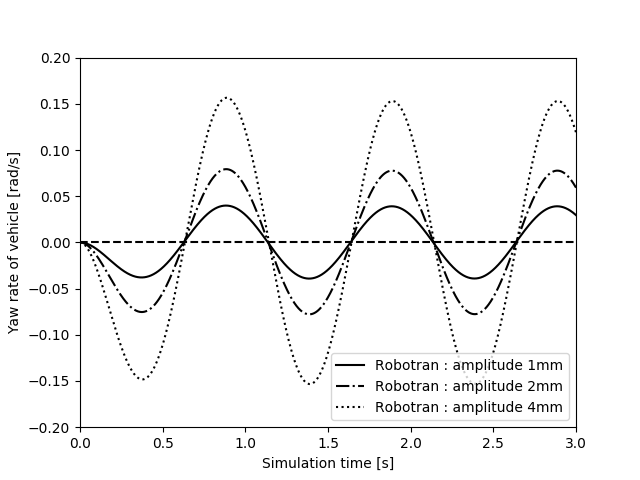
Find below some simulations results obtained with ROBOTRAN. Refers to [1] to get the results obtained in the reference benchmark.
[1] Frik, Leister & Schwartz (1993) Simulation of the IAVSD Road Vehicle Benchmark Bombardier Iltis with FASIM, MEDYNA, NEWEUL and SIMPACK, Vehicle System Dynamics, 22:sup1, 215-253, DOI: 10.1080/00423119308969496