Abstract : This study aims at developing efficient humanoid robot controllers for locomotion. The originality of the work stayed in the two-step development of the research. First, simulation helped at designing efficient controllers. Those latter were afterwards implemented to the real hardware.
The design of humanoid robot controllers is a complex task, which is difficult to directly perform on such robots for several reasons:
humanoid robots are expensive;
(they are usually shared by a huge team;
it is not straightforward to have access to all the robot and
environment variables;
direct controllers implementation can damage the robot (while being
potentially dangerous for the operator);
bipedal stability is difficult to maintain;
parameters tuning/optimization is usually not possible on the real
hardware.
For all these reasons, the design of these robot controllers can benefit from being first performed in simulation, with the purpose to port them later to the real hardware.
Very fast simulators of humanoid robots were implemented taking advantage of the symbolic approach of Robotran. Thanks to the simulators, controllers were designed to obtain bio-inspired locomotion and gaze stabilization algorithms on different humanoid robots. For instance, regarding the design of the bio-inspired gaits, the related controllers recruited many unknown parameters, which were tuned during extensive optimization processes using the Robotran simulator.
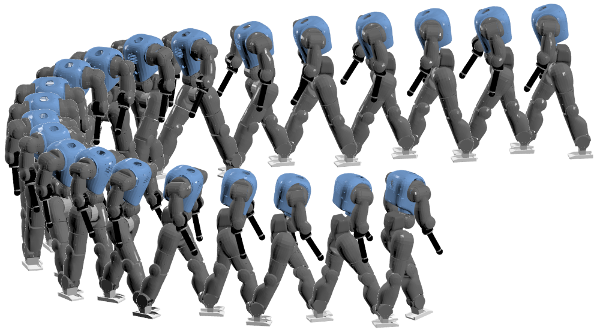
Legend : Starting from a straight locomotion, the COMAN robot adapts its gait to acheive left turning
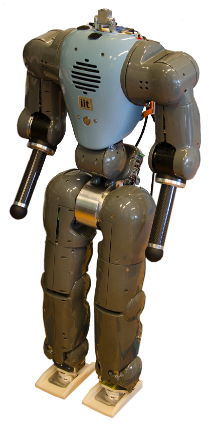
Picture of the Real COMAN
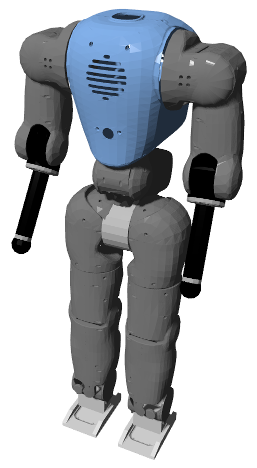
Picture of it its model in Robotran
The bio-inspired locomotion controller of COMAN recruits many unknown parameters. These parameters are optimized over successive generations in the Robotran simulator using a Particle Swarm Optimization algorithm
The COMAN walking controller is first designed and optimized in a 2D simulation environment (i.e. with lateral support) in Robotran. The exact same controller is then ported to the real platform without further parameters modification
Zobova AA, Habra T, Van der Noot N, Dallali H,
Tsagarakis NG, Fisette P and Ronsse R (2017) Multi-physics modelling of a
compliant humanoid robot. Multibody System Dynamics 39 (1-2), pp. 95-114. DOI:
10.1007/s11044-016-9545-4.
Van der Noot N, Colasanto L, Barrea A, van den Kieboom
J, Ronsse R and Ijspeert AJ (2015) Experimental validation of a bio-inspired
controller for dynamic walking with a humanoid robot. In: 2015 IEEE/RSJ
International Conference on Intelligent Robots and Systems (IROS), Hamburg,
Sept. 28 2015-Oct. 2 2015, pp. 393-400. DOI: 10.1109/IROS.2015.7353403.
Van der Noot N, Ijspeert AJ and Ronsse R (2015) Biped
gait controller for large speed variations, combining reflexes and a central
pattern generator in a neuromuscular model. In: 2015 IEEE International
Conference on Robotics and Automation (ICRA), Seattle, WA, 26-30 May 2015, pp.
6267-6274. DOI: 10.1109/ICRA.2015.7140079.
Heremans F, Van der Noot N, Ijspeert AJ and Ronsse R
(2016) Bio-inspired balance controller for a humanoid robot. In: 2016 6th IEEE
International Conference on Biomedical Robotics and Biomechatronics (BioRob),
Singapore, 26-29 June 2016, pp. 441-448. DOI: 10.1109/BIOROB.2016.7523667.
Colasanto L, Van der Noot N and Ijspeert AJ (2015)
Bio-inspired walking for humanoid robots using feet with human-like compliance
and neuromuscular control. In: 2015 IEEE-RAS 15th International Conference on
Humanoid Robots (Humanoids), Seoul, 3-5 Nov. 2015, pp. 26-32. DOI:
10.1109/HUMANOIDS.2015.7363518.
Partner institutions:
Université catholique de Louvain (UCLouvain)
École polytechnique fédérale de Lausanne (EPFL)
Istituto Italiano di Tecnologia (IIT)
Simulators were developped within the frame of the EU research project WALK-MAN (http://walk-man.eu/)
Nous utilisons des cookies pour vous garantir la meilleure expérience sur notre site web. Si vous continuez à utiliser ce site, nous supposerons que vous en êtes satisfait.