Abstract:
A biomechanical model, using the multibody dynamics approach, is developed to calculate the intervertebral efforts in spine. The latter are computed, via inverse dynamics, using kinematic information from gait. Optimization process is required in order to convert that information, expressed in absolute coordinates from the optometric sensors, into relative joint coordinates, in order to calculate joint forces and torques.
Keywords : Spine, Efforts, Dynamics, Scoliosis
The evaluation of internal forces and torques in the human body in motion could provide valuable information for the evaluation and follow-up of subjects with musculo-skeletal pathologies, such as scoliosis. But these data are still difficult to measure accurately. In this challenging context, the objective of this study is to check the hypothesis that there exist different dynamical behaviors and effects in the spine between a healthy subject and a scoliotic patient before and after spine fusion surgery.
The Spine Research Society (SRS) definition of adolescent idiopathic scoliosis (AIS) is a structural lateral curvature of the spine that creates a thoracic and/or lumbar asymmetry on forward bending (a.k.a. the “Adams forward bend test”) combined with a curve of at least 10 as measured by the Cobb technique on a standing radiograph of the spine with associated vertebral rotation along the vertebral direction (torsion). When scoliosis is defined as a Cobb angle of at least 10 degrees, epidemiologic studies estimate that 1% to 3% of children aged 10 to 16 years will have some degree of spinal curvature.
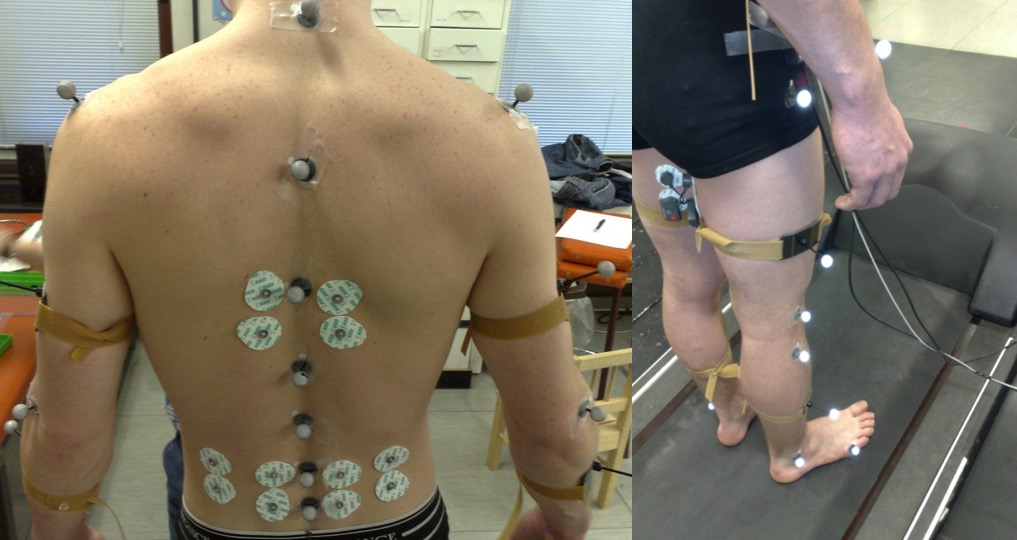
Data acquisition
Data acquisition Joint kinematic identification
The joint coordinates, velocities and accelerations are numerically determined via an optimization process that estimates the joint coordinates q of the multibody model that best fit the experimental kinematics.
Inverse dynamics
Using a recursive Newton-Euler formalism, a 3D multibody model provides the vector Q of the joint forces and torques during gait.
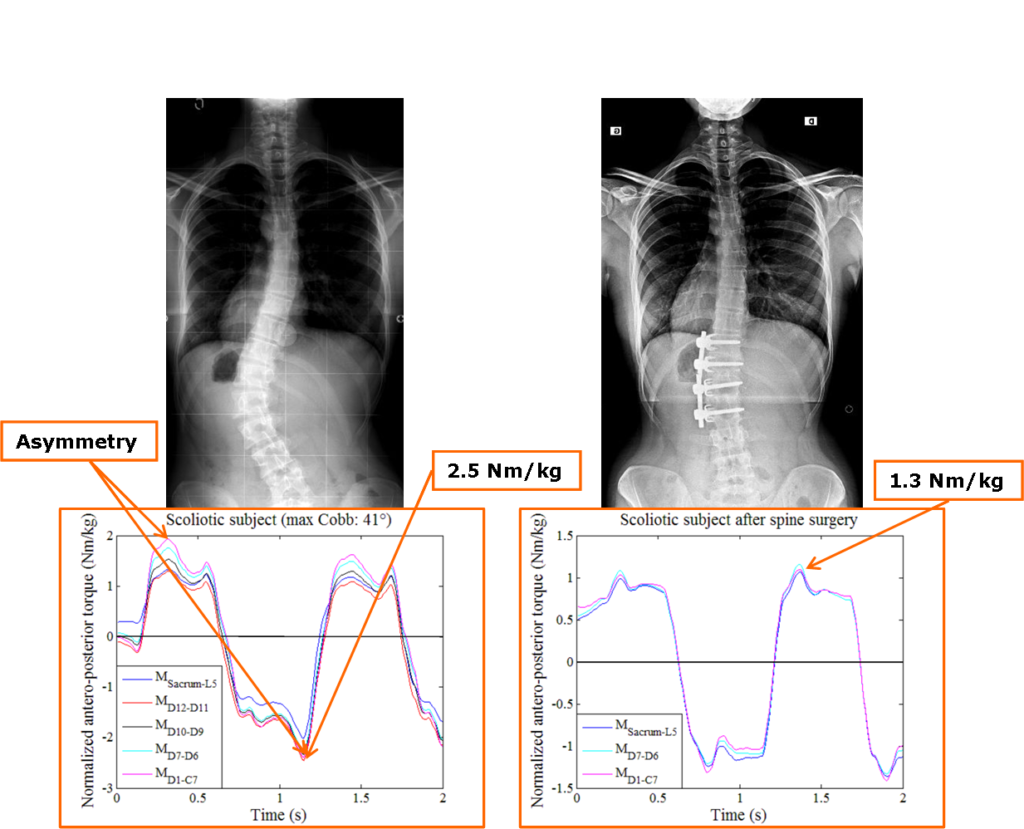
Significant differences in kinematics and were observed between the subjects, leading to different internal effort behavior in magnitude, maxima and minima when normalized to the subject mass. Considering for example the normalized anteroposterior torques (NAPT) between vertebrae:
iMMC/MEED, Université catholique de Louvain (UCLouvain), Louvain-la-Neuve, Belgium
IREC/NMSK, Université catholique de Louvain (UCLouvain), Brussels, Belgium
Cliniques universitaires St-Luc (UCLouvain), Brussels, Belgium
Sainte-Justine UHC and Polytechnique Montréal, Montréal QC, Canada
Abedrabbo G, Fisette P, Absil PA, Mahaudens P, Detrembleur C, Raison M, Banse X, Aubin CE, Mousny M., A multibody-based approach to the computation of spine intervertebral motions in scoliotic patients. Stud Health Technol Inform. 2012;176:95-8.