
Abstract:
To study some industrial process, it may be helpful to model a machine interacting with granular media (e.g. the tamping process of railway track). On one hand, the Discrete Element Method (DEM) allows us to model material composed of a huge amount of grains, taking the contact between each particl into account. On the other hand, machines can be modelled as a MultiBody System (MBS), for instance using Robotran.
Some contact laws in the granular media introduce non-penetration constraint between the surfaces of the grains. Such constraints, called unilateral constraints, requires specific numerical process. This specific numerical solution have to ensure that the kinematic constraints inside the multibody systems are respected.
Therefore, we developed a strong coupling methodology for unifying our multibody formalism using relative coordinates and a discrete element method based on non-smooth contact dynamics (NSCD). This was implemented by coupling Robotran with LMGC90, developed at University of Montpellier.
For the industrial application, simulations conducted using this approach highlight the huge impact of the tamping machine dynamics when evaluating the tamping process performances.
Keywords: Contact, Granular, Non-Smooth Dynamics, Lmgc90, DEM
An efficient approach to model contact in granular media is to treat them as constraints. However this approach requires specific numerical scheme to solve the contact problem and the non-smooth dynamics due to impacts.
For application with a lot of grains, it has been observed that the resolution of the contact constraints at the velocity is sufficient. The small penetration between grains does not prevent to get the correct bulk behavior of the granular material.
On the other hand multibody system contains bilateral constraints. Such constraints must be solved exactly at position, velocity and acceleration levels to ensure that its joints are correctly modelled. Small deviations in bilateral constraints quickly lead to incorrect system dynamic.
In short, the solution consists in introducing the bilateral constraints of the multibody system in the contact solver, as detailed in [1]. This guarantees that the contact solution respects the constraints of the multibody system.
The implementation of this solution has been done by deep-coupling Robotran and LMGC90. The latter dedicated to physics simulation of discrete material.
The tamping process is a maintenance operation performed on railway tracks. This operation restores a smooth track geometry. While the rail is lift to the desired position, the ballast under the sleeper is compacted by the tamping machine.
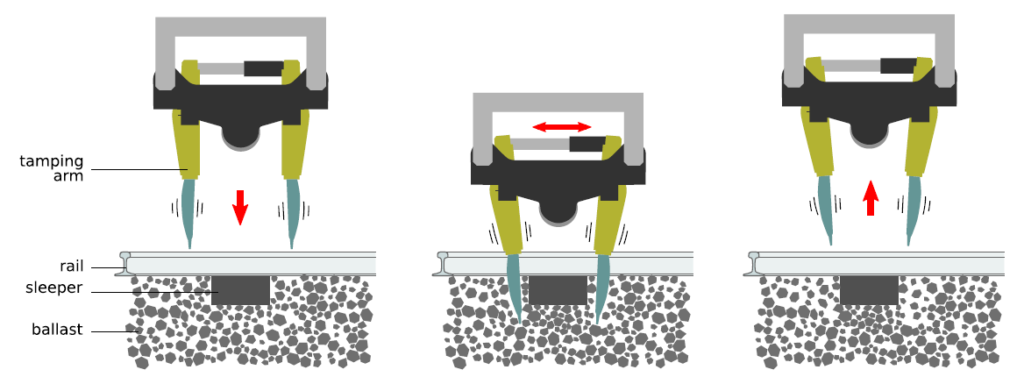
This process is facilitated by the vibration of the tamping machine. The vibrations induces a viscous-like state in the ballast allowing easy diving and squeezing.
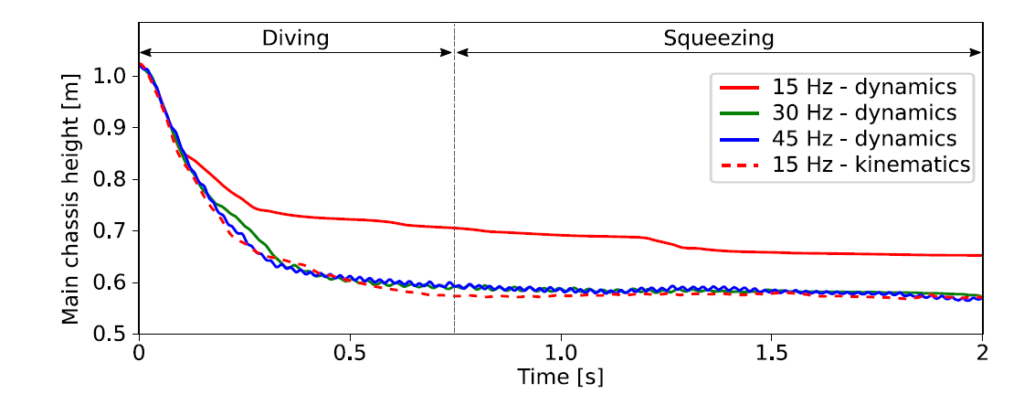
Our simulations shows that neglecting the effect of the granular media on the machine leads to erroneous results. Indeed imposing the kinematic lead to the conclusion that a vibration of 15Hz is sufficient to dive. On the opposite taking into account for the dynamics lead to a required vibration frequency of 30Hz with is in the range of existing machine.
[1] Docquier, N., Lantsoght, O., Dubois, F., Brüls O., Modelling and simulation of coupled multibody systems and granular media using the non-smooth contact dynamics approach. Multibody Syst Dyn49, 181–202 (2020). https://doi.org/10.1007/s11044-019-09721-0